21. Tuning Strategies 2
Gradient Descent Algorithm ("Twiddle")
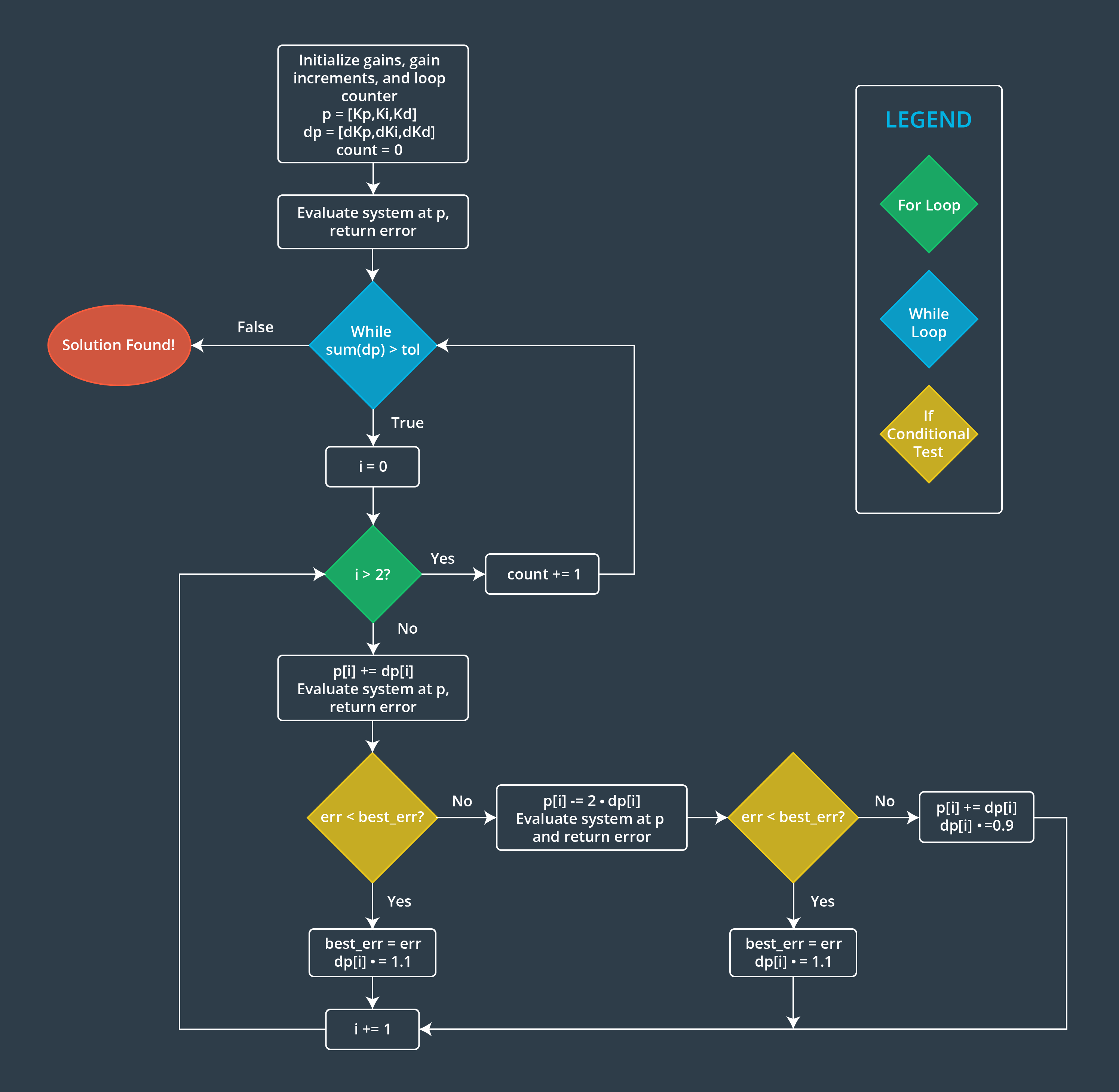
A more automatic approach is to use a gradient descent algorithm, sometimes referred to as “Twiddle”. The premise is that you start with a vector of initial guesses for the three gains. A small non-zero value for P, and zeros for I and D is generally recommended. Then you individually make small changes to each of the gains and test if the cost function decreases. If it does, you keep changing the parameter in the same direction, otherwise you try adjusting the parameter in the opposite direction. If neither an increase or a decrease in the gain value decreases the cost function then you reduce the size of the gain increment and repeat. The whole cycle should continue until the size of the increment falls below some threshold value.
One of the challenges is to decide what the error function should be: maximum percent overshoot? Settling time? Some linear combination of them? Ultimately the error function must be distilled into a single scalar value that has a clear magnitude.
Start Quiz: